safe imitation learning
safe imitation of a nonlinear model predictive control for flexible robots
Introduction
Controlling flexible robots is difficult primarily because they are infinite dimensional and underactuated. Existing model-based methods – linear quadratic regulator [?] and model predictive controller [?] – employ linearized models. More advanced and promising approach is nonlinear model predictive control (NMPC). The major limitation of NMPC preventing its widespread use is computational burden of solving nonlinear optimization problem. In this work we propose a method that attempts to bring NMPC to industry.
Method
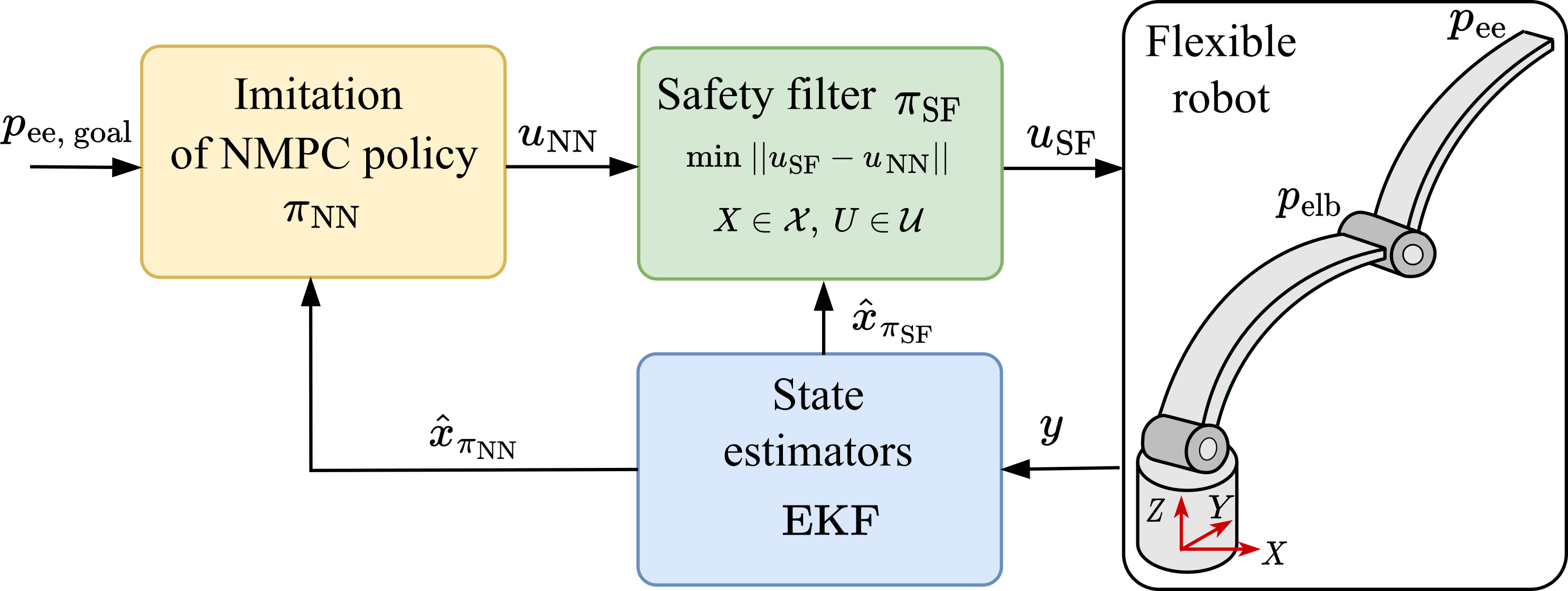
In this work we first formulate NMPC denoted as \(\pi_{NMPC}(x)\) and show that it can successfully used for controlling flexible robot. Then, we propose to approximate NMPC using imitation learning algorithm called DAgger offline \(\pi_{NN}(x)\). To guarantee safety of the approximated NMPC law, we propose to filter the output of \(\pi_{NN}(x)\) with the safety filter.
Results